为积极相应学校提高研究生理论与实践结合的号召,2025年7月11日上午,南昌大学数学与计算机学院举办了“前湖“研”讲|第十五届研究生学术文化节·导师讲坛(第178期)(“香樟研创”研究生数学建模竞赛训练营第7期)。本期导师讲坛特邀上海交通大学数学科学学院李大明教授,以2025年江西省研究生数学模竞赛赛题“工业机器人机械臂运动和控制”为题进行分享。本次学术讲坛以腾讯会议的方式进行,由学院谌鸿佳老师主持召开,线上共计50余名研究生与会学习。
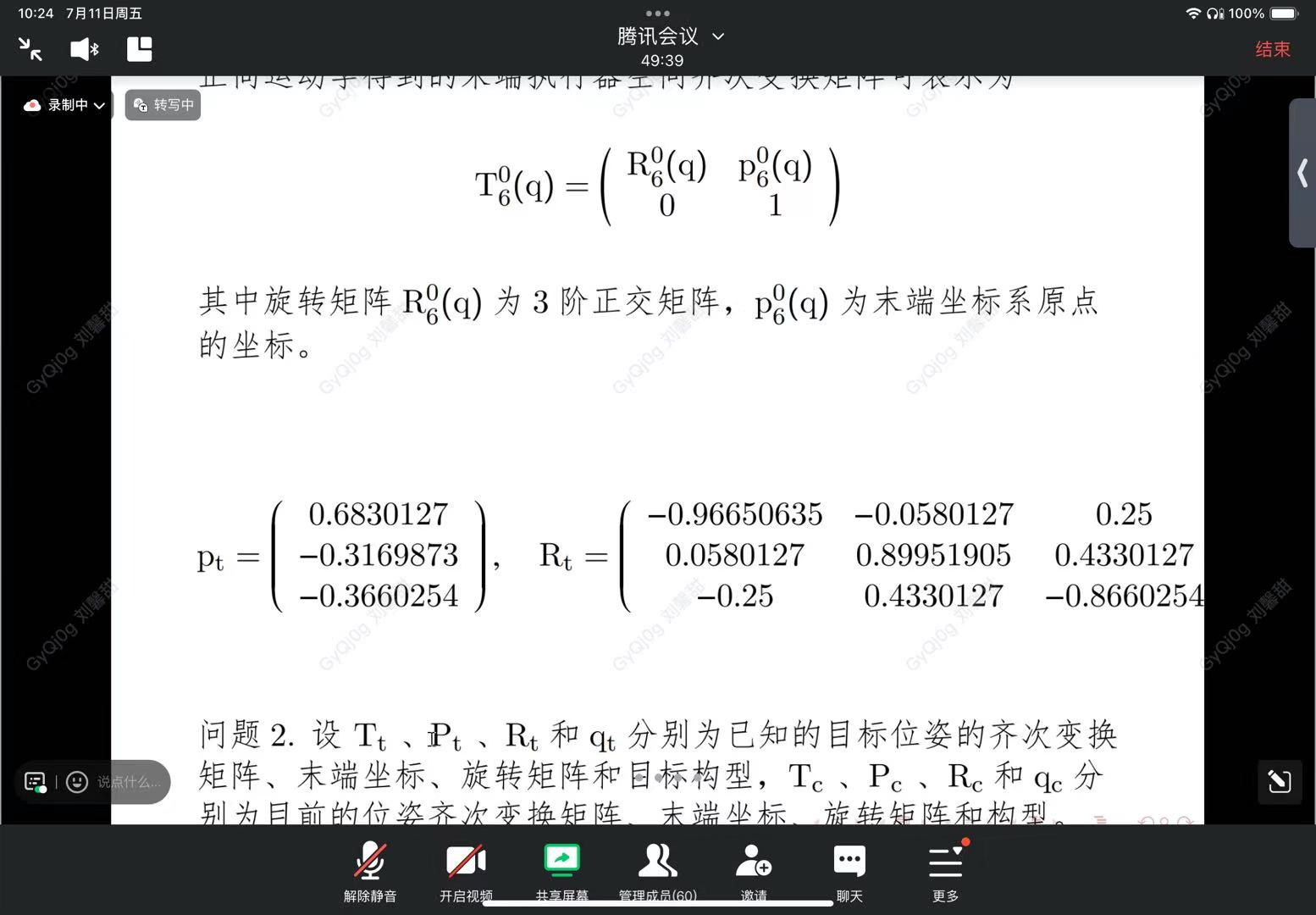
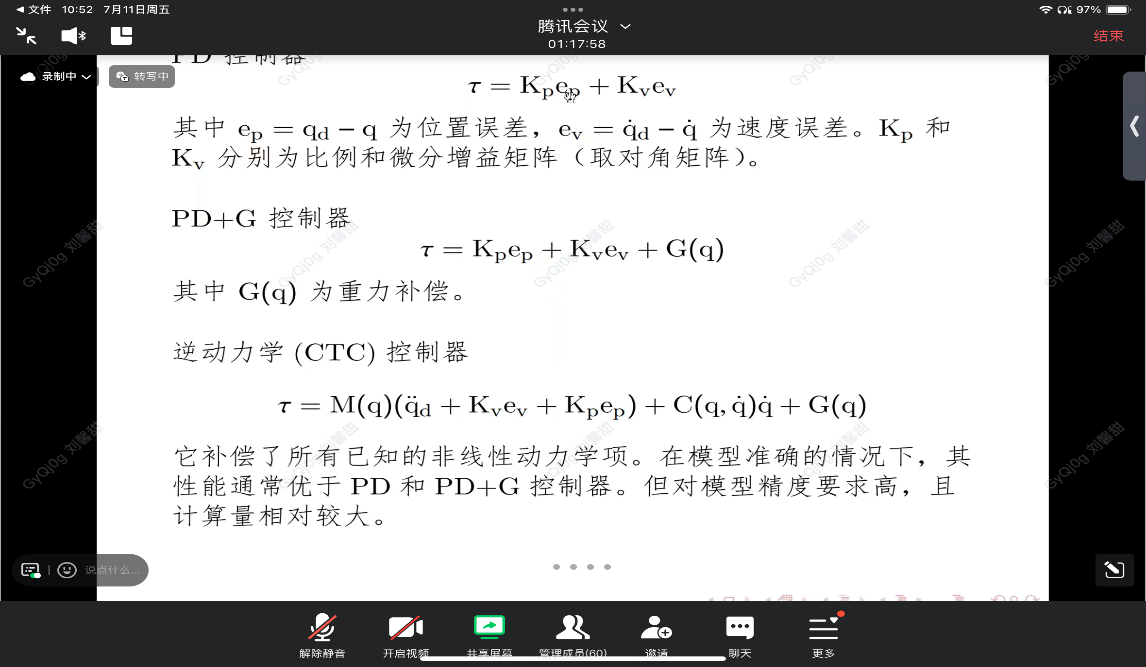
本次会议重点探讨了机器人的正向、逆向运动学原理、轨迹规划及动力学控制等核心技术问题。会议伊始,李教授介绍了工业机器人的运动学模型。接着,李教授系统讲解了正向、逆向运动学问题。对于正向动力学思路,他强调坐标系变化在计算中的重要性,并举例说明,当q取特定构型时,如何计算R60和P60。在逆向动力学思路讲解时,李教授通过构造迭代过程,使得初始构型Q0逐步趋近目标构型qt,并展示了误差收敛图表,验证了该方法的有效性。
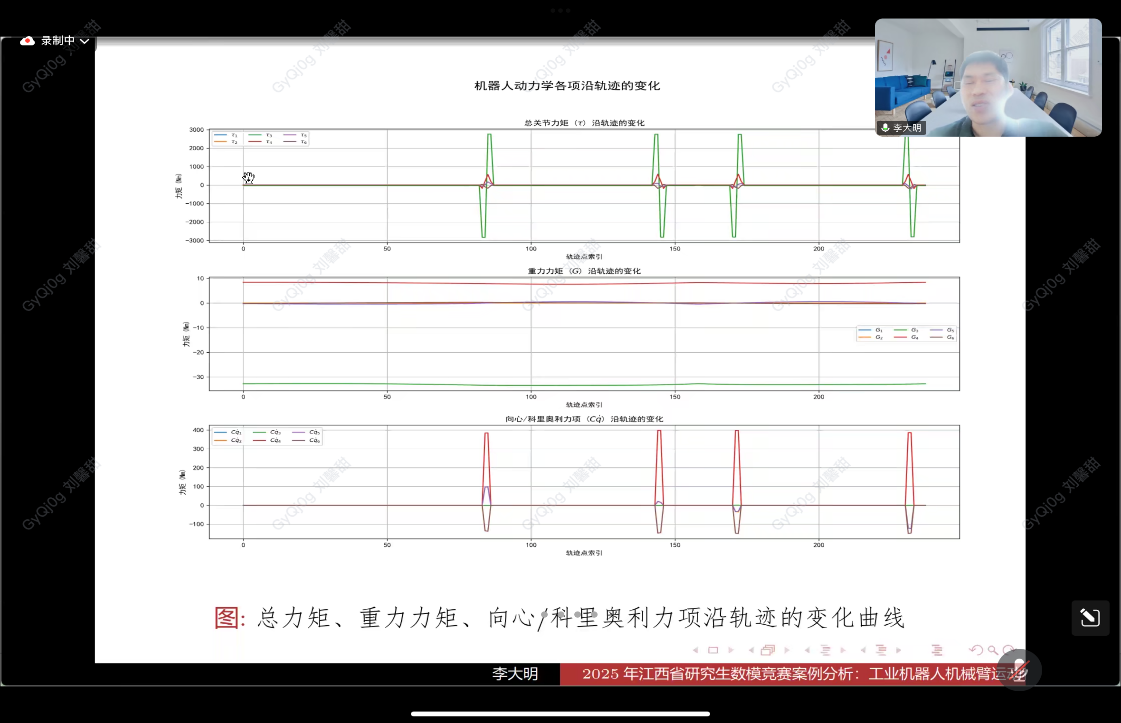
通过非线性微分方程描述关节运动,考虑惯性力、向心力、重力等因素的作用,李教授描述了机器人在外部力作用下的动力学过程,使同学们对该题的运动过程更加明确。最后,李教授指出,可运用螺旋理论将运动学和动力学进行统一,通过六维向量描述速度和力。运用该方法使结果更精确,方法又创新。
本次数学建模讲座的成功开展,以江西省数学建模真题为切入点,系统讲解了该类型问题的解题思路与模型选择,助力数学与计算机学院研究生理解该问题重难点,熟悉建模思路。
文稿:李佳
摄影:刘馨甜
审阅:宋悦
